Cameras for physical-digital fusion
Today, there are digital models of different environments being used in a wide variety of ways such as planning efficient operations in factories, ensuring safety of personnel, and outdoor fleet management. These models are effective as long as the models are updated in real time as assets, people and unmanned vehicles move through the environment. This can prove to be challenging. Safety alerts for industrial collision avoidance, for example, can only be issued in time if the digital model of the factory captures the locations of colliding entities along with their direction of movement well in advance of a potential collision.
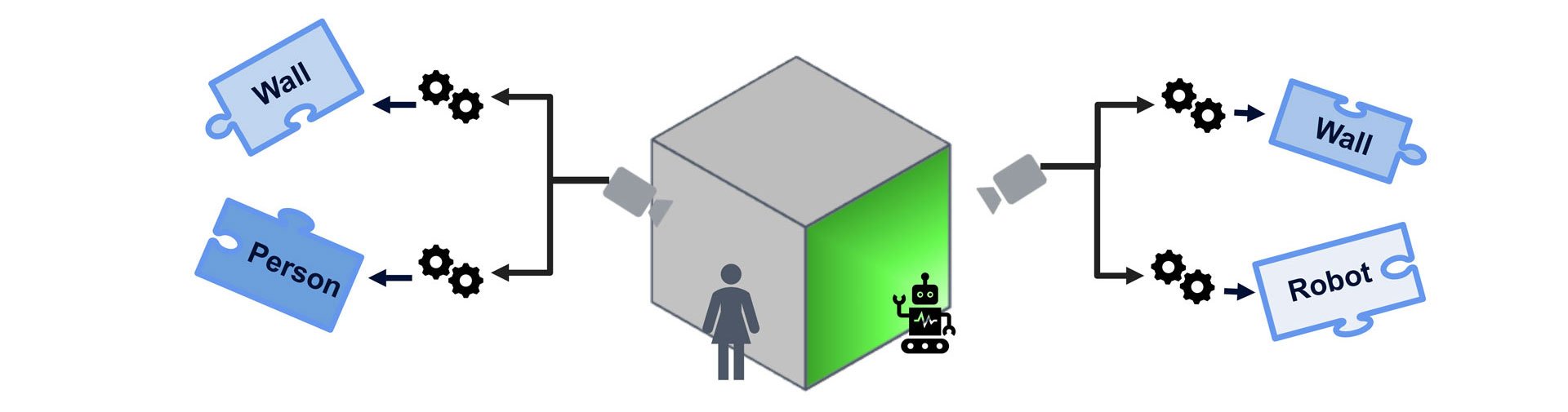
Our Fixed Camera Positioning system solves this problem by using existing or deploying new camera networks to process simultaneous video feeds which update the digital model of the environment in real-time with information such as identity of the entity, location estimates and movement tracking.
Our scalable Fixed Camera Positioning system
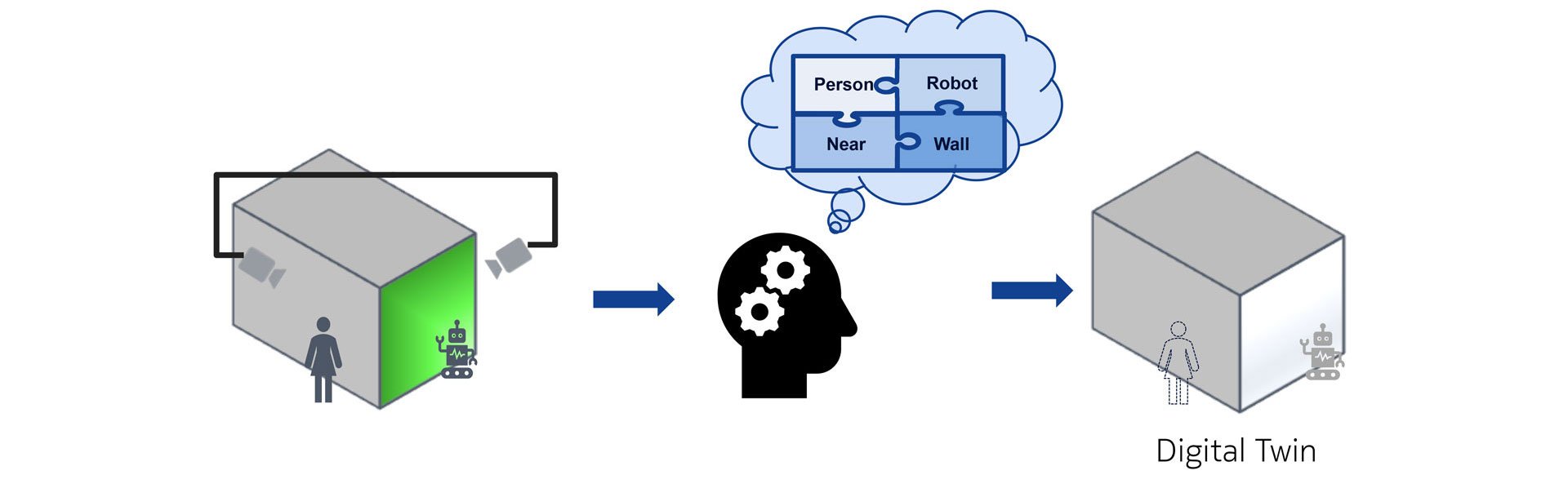
At Bell Labs, we are building an accurate, efficient, and scalable fixed-camera positioning system that can simultaneously detect, track, and localize a large number of entities in real time using proprietary algorithms. Our system can easily accommodate any camera network and leverages existing digital twin models allowing you to take action remotely, in real-time. Besides providing real-time updates, our system provides automated data collection for continuous updating of learning models while minimizing the camera calibration effort.
Our methods will allow the system to adapt to harsh environmental conditions such as poor lighting or dust in an underground mine. We are also working on tracking visually similar entities such as medical workers wearing similar looking lab coats in a hospital. Range extension algorithms have been implemented to detect small objects at a distance reducing the number of cameras needed for full coverage. In addition, our system components are optimized for real-time performance using an architecture that leverages resource pooling to minimize compute and can easily be scaled via software configuration for many camera sensors. This allows for continuous updating of digital twin, ensuring that the model is accurate, and factories can run more efficiently.
Real-world deployment and benchmarking
We tested our Fixed Camera Positioning system on a floor in an office building and in a live factory. Within these environments, the average localization accuracy was in the range of 50-75cm. Our solution enabled collision avoidance in the factory resulting in fewer stalls of unmanned ground vehicles and improved productivity. The system was also able to monitor proximity of employees to sensitive equipment and test robots in the office building. Measured latencies of less than a second also ensured that the system could provide valuable timely information to autonomous robot agents for efficient path planning across the factory. Range extension allowed detection of small robots as far as 30 meters from the camera which increased coverage of existing camera networks by 30-40%.
Our differentiators
Low-cost installation that repurposes existing cameras
Zero-touch tracking to track and localize assets without having to modify them
High accuracy for identification and localization