Distributed Algorithms for Multi Robot Coordination
We are building a system based on ROS that non-invasively enables coordinated and collision-free navigation of multiple autonomous robots. Our system makes no assumption about the inner workings of the robot's path-planner or motion controller. We use our system to enable a heterogeneous fleet of autonomous robots to safely navigate a shared environment.

Collision-free navigation of a fleet of robots
Reinforcement Learning for Navigation and Collision Avoidance in Cloud Robotics
We are building a ROS local planner that's driven by a Reinforcement Learning (RL) agent. the agent state is an image derived from the local dynamic environment and the training is similar to RL training for agents. The resulting agent controls the robot from the cloud and enables safe navigation in dynamic environments with unpredictable obstacles (such as people working in a factory or warehouse).
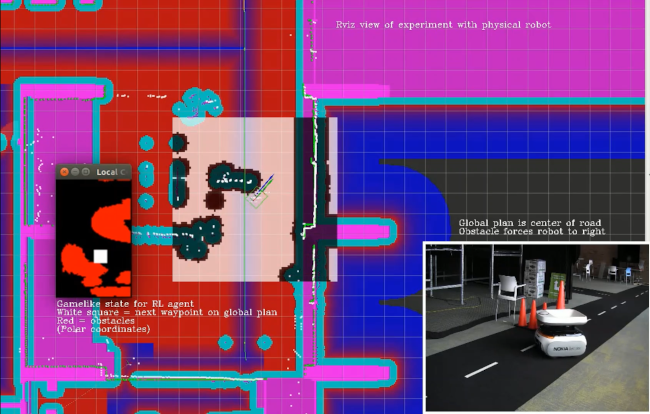
Our goal is to build an agent that can navigate any room with moving humans without any manual tuning
Robot Localization from Noisy Sources
We localize indoor robots using camera-tracing and noisy RF sensors. Our algorithms employ robot velocity prediction and ongoing correlation against original robot plans.

Predicted AGV velocity from noisy raw sensor info





APA style publications
-
Khaled Nakhleh, Minahil Raza, Mack Tang, Matthew Andrews, Rinu Boney, Ilija Hadzic, Jeongran Lee, Atefeh Mohajeri, Karina Palyutina "SACPlanner: Real-World Collision Avoidance with a Soft Actor Critic Local Planner and Polar State Representations", 2023 IEEE International Conference on Robotics and Automation (ICRA) [pdf]
Discover more

Video
AI-enhance wireless reliability: joint source and channel coding for robust 6G air interface

Blog

Blog

Podcast